Category CAD

Search-and-Rescue Robot Dog: Autonomous Exploration and Visual SLAM with Unitree Go1
C++, ROS2/ROS, Python, SLAM, Computer Vision, Exploration, Legged Locomotion, Unitree, Zed, Jetson
Category Circuit Design

Data-Driven Control for Agile Flight in a Confined Space
C++, Python, ROS2/ROS, Aerial Robots, Motion Planning, Computer Vision, Dynamic Systems
Home Automation with Clap Sequence Control
C++, Signal Processing, Circuit Design
Robot playing T-Rex Game
C++, Manipulation, Signal Processing, Mechatronics, Circuit Design
Purge Mask with EL Wire
Circuit Design
Category Lua
Super Mario Game from scratch
Lua, Data Structures, Simulation
Category Data Structures

Full Self Driving Airport Cargo Vehicle
C++, Python, ROS2/ROS, SLAM, Motion Planning, Machine Learning, Professional Software Development
Data-Driven Control for Agile Flight in a Confined Space
C++, Python, ROS2/ROS, Aerial Robots, Motion Planning, Computer Vision, Dynamic Systems
HEBI Robotics: Internship
C++, Python, ROS2/ROS, C, Java, MATLAB, Professional Software Development
Multi-Agent Reinforcement Learning for Exploration, with custom Physics Simulator from scratch
Deep Learning, ROS2/ROS, C++, PyTorch, SLAM, Simulation, Motion Planning, Turtlebot
Search-and-Rescue Robot Dog: Autonomous Exploration and Visual SLAM with Unitree Go1
C++, ROS2/ROS, Python, SLAM, Computer Vision, Exploration, Legged Locomotion, Unitree, Zed, Jetson
Complete Extended-Kalman-Filter SLAM Pipeline in C++ from Scratch
ROS2/ROS, C++, CMake, SLAM, Machine Learning, Python, Wheeled Locomotion, Turtlebot
Mobile/Whole-Body Manipulation with KUKA youBot
MATLAB, Manipulation, Motion Planning, Controls, CoppeliaSim, KUKA youBot
Dexterous Manipulation through Virtual Reality
Python, ROS2/ROS, Computer Vision, Manipulation, Motion Planning, Gazebo, Shadow Hands, Emika Franka Robot Arm, Intel RealSense, ABB Gofa Arm
Optimized Torque-Control for Load Carrying
Research, Python, Legged Locomotion, Model-Predictive Control, Nonlinear Optimization, Dynamic Systems, HEBI Daisy Hexapod
Dancing Hexapod - Full SE3 Body Pose Control
Python, Motion Planning, Legged Locomotion, PyBullet, HEBI Daisy Hexapod

TeleOperation of Robot Swarms with ROS
Python, ROS2/ROS, Motion Planning, Controls, Wheeled Locomotion, Jetson Nano
Navigation and Kalman Filter Localization of Self Driving Car
Python, Motion Planning, Controls, Signal Processing, Wheeled Locomotion, Webots
Robot playing T-Rex Game
C++, Manipulation, Signal Processing, Mechatronics, Circuit Design
Super Mario Game from scratch
Lua, Data Structures, Simulation
Category Simulation
Full Self Driving Airport Cargo Vehicle
C++, Python, ROS2/ROS, SLAM, Motion Planning, Machine Learning, Professional Software Development
HEBI Robotics: Internship
C++, Python, ROS2/ROS, C, Java, MATLAB, Professional Software Development
Multi-Agent Reinforcement Learning for Exploration, with custom Physics Simulator from scratch
Deep Learning, ROS2/ROS, C++, PyTorch, SLAM, Simulation, Motion Planning, Turtlebot
Genetic Algorithm for Slithering and Sidewinding creatures
Python, MuJoCo, Machine Learning, Nonlinear Optimization, Controls
Mobile/Whole-Body Manipulation with KUKA youBot
MATLAB, Manipulation, Motion Planning, Controls, CoppeliaSim, KUKA youBot
Dexterous Manipulation through Virtual Reality
Python, ROS2/ROS, Computer Vision, Manipulation, Motion Planning, Gazebo, Shadow Hands, Emika Franka Robot Arm, Intel RealSense, ABB Gofa Arm
Optimized Torque-Control for Load Carrying
Research, Python, Legged Locomotion, Model-Predictive Control, Nonlinear Optimization, Dynamic Systems, HEBI Daisy Hexapod
Dancing Hexapod - Full SE3 Body Pose Control
Python, Motion Planning, Legged Locomotion, PyBullet, HEBI Daisy Hexapod
Ploughing through Clutter: Robust Non-Holonomic Motion Control
Python, Controls, Nonlinear Optimization, Manipulation, PyBullet, Wheeled Locomotion, Turtlebot
Navigation and Kalman Filter Localization of Self Driving Car
Python, Motion Planning, Controls, Signal Processing, Wheeled Locomotion, Webots
Super Mario Game from scratch
Lua, Data Structures, Simulation
Category C++
Full Self Driving Airport Cargo Vehicle
C++, Python, ROS2/ROS, SLAM, Motion Planning, Machine Learning, Professional Software Development
Data-Driven Control for Agile Flight in a Confined Space
C++, Python, ROS2/ROS, Aerial Robots, Motion Planning, Computer Vision, Dynamic Systems
HEBI Robotics: Internship
C++, Python, ROS2/ROS, C, Java, MATLAB, Professional Software Development
Multi-Agent Reinforcement Learning for Exploration, with custom Physics Simulator from scratch
Deep Learning, ROS2/ROS, C++, PyTorch, SLAM, Simulation, Motion Planning, Turtlebot
Search-and-Rescue Robot Dog: Autonomous Exploration and Visual SLAM with Unitree Go1
C++, ROS2/ROS, Python, SLAM, Computer Vision, Exploration, Legged Locomotion, Unitree, Zed, Jetson
Complete Extended-Kalman-Filter SLAM Pipeline in C++ from Scratch
ROS2/ROS, C++, CMake, SLAM, Machine Learning, Python, Wheeled Locomotion, Turtlebot
Home Automation with Clap Sequence Control
C++, Signal Processing, Circuit Design
Robot playing T-Rex Game
C++, Manipulation, Signal Processing, Mechatronics, Circuit Design
Category Manipulation
Full Self Driving Airport Cargo Vehicle
C++, Python, ROS2/ROS, SLAM, Motion Planning, Machine Learning, Professional Software Development
HEBI Robotics: Internship
C++, Python, ROS2/ROS, C, Java, MATLAB, Professional Software Development
Mobile/Whole-Body Manipulation with KUKA youBot
MATLAB, Manipulation, Motion Planning, Controls, CoppeliaSim, KUKA youBot
Dexterous Manipulation through Virtual Reality
Python, ROS2/ROS, Computer Vision, Manipulation, Motion Planning, Gazebo, Shadow Hands, Emika Franka Robot Arm, Intel RealSense, ABB Gofa Arm
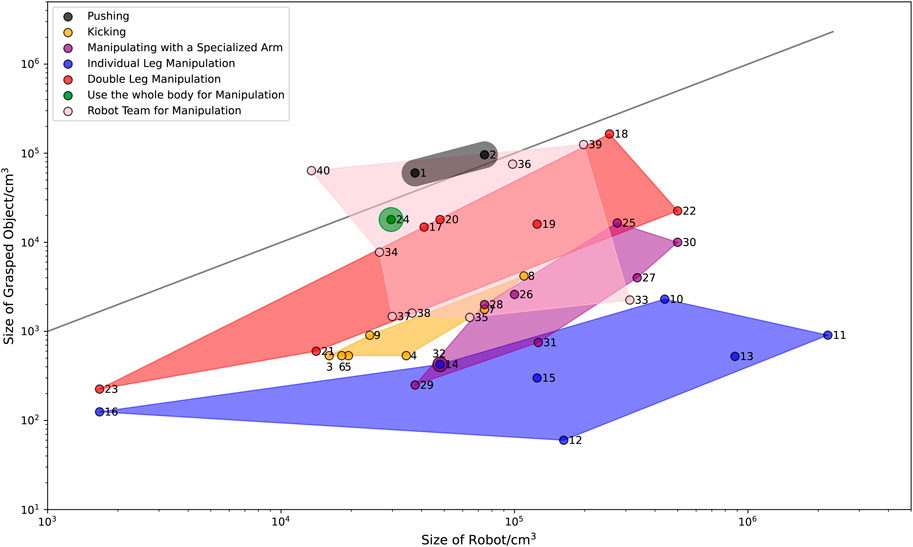
Legged Robots for Object Manipulation: A Review
Research, Legged Locomotion, Manipulation
Ploughing through Clutter: Robust Non-Holonomic Motion Control
Python, Controls, Nonlinear Optimization, Manipulation, PyBullet, Wheeled Locomotion, Turtlebot
Robot playing T-Rex Game
C++, Manipulation, Signal Processing, Mechatronics, Circuit Design
Category Signal Processing
Navigation and Kalman Filter Localization of Self Driving Car
Python, Motion Planning, Controls, Signal Processing, Wheeled Locomotion, Webots
Home Automation with Clap Sequence Control
C++, Signal Processing, Circuit Design
Robot playing T-Rex Game
C++, Manipulation, Signal Processing, Mechatronics, Circuit Design
Category Mechatronics
Data-Driven Control for Agile Flight in a Confined Space
C++, Python, ROS2/ROS, Aerial Robots, Motion Planning, Computer Vision, Dynamic Systems
Robot playing T-Rex Game
C++, Manipulation, Signal Processing, Mechatronics, Circuit Design
Category Python
Full Self Driving Airport Cargo Vehicle
C++, Python, ROS2/ROS, SLAM, Motion Planning, Machine Learning, Professional Software Development
Data-Driven Control for Agile Flight in a Confined Space
C++, Python, ROS2/ROS, Aerial Robots, Motion Planning, Computer Vision, Dynamic Systems
HEBI Robotics: Internship
C++, Python, ROS2/ROS, C, Java, MATLAB, Professional Software Development
Multi-Agent Reinforcement Learning for Exploration, with custom Physics Simulator from scratch
Deep Learning, ROS2/ROS, C++, PyTorch, SLAM, Simulation, Motion Planning, Turtlebot
Search-and-Rescue Robot Dog: Autonomous Exploration and Visual SLAM with Unitree Go1
C++, ROS2/ROS, Python, SLAM, Computer Vision, Exploration, Legged Locomotion, Unitree, Zed, Jetson
Complete Extended-Kalman-Filter SLAM Pipeline in C++ from Scratch
ROS2/ROS, C++, CMake, SLAM, Machine Learning, Python, Wheeled Locomotion, Turtlebot
Genetic Algorithm for Slithering and Sidewinding creatures
Python, MuJoCo, Machine Learning, Nonlinear Optimization, Controls
Dexterous Manipulation through Virtual Reality
Python, ROS2/ROS, Computer Vision, Manipulation, Motion Planning, Gazebo, Shadow Hands, Emika Franka Robot Arm, Intel RealSense, ABB Gofa Arm
Maze Solver
Python, Motion Planning
Optimized Torque-Control for Load Carrying
Research, Python, Legged Locomotion, Model-Predictive Control, Nonlinear Optimization, Dynamic Systems, HEBI Daisy Hexapod
Dancing Hexapod - Full SE3 Body Pose Control
Python, Motion Planning, Legged Locomotion, PyBullet, HEBI Daisy Hexapod
Ploughing through Clutter: Robust Non-Holonomic Motion Control
Python, Controls, Nonlinear Optimization, Manipulation, PyBullet, Wheeled Locomotion, Turtlebot
TeleOperation of Robot Swarms with ROS
Python, ROS2/ROS, Motion Planning, Controls, Wheeled Locomotion, Jetson Nano
Navigation and Kalman Filter Localization of Self Driving Car
Python, Motion Planning, Controls, Signal Processing, Wheeled Locomotion, Webots
Category Motion Planning
Full Self Driving Airport Cargo Vehicle
C++, Python, ROS2/ROS, SLAM, Motion Planning, Machine Learning, Professional Software Development
Data-Driven Control for Agile Flight in a Confined Space
C++, Python, ROS2/ROS, Aerial Robots, Motion Planning, Computer Vision, Dynamic Systems
HEBI Robotics: Internship
C++, Python, ROS2/ROS, C, Java, MATLAB, Professional Software Development
Multi-Agent Reinforcement Learning for Exploration, with custom Physics Simulator from scratch
Deep Learning, ROS2/ROS, C++, PyTorch, SLAM, Simulation, Motion Planning, Turtlebot
Search-and-Rescue Robot Dog: Autonomous Exploration and Visual SLAM with Unitree Go1
C++, ROS2/ROS, Python, SLAM, Computer Vision, Exploration, Legged Locomotion, Unitree, Zed, Jetson
Complete Extended-Kalman-Filter SLAM Pipeline in C++ from Scratch
ROS2/ROS, C++, CMake, SLAM, Machine Learning, Python, Wheeled Locomotion, Turtlebot
Mobile/Whole-Body Manipulation with KUKA youBot
MATLAB, Manipulation, Motion Planning, Controls, CoppeliaSim, KUKA youBot
Dexterous Manipulation through Virtual Reality
Python, ROS2/ROS, Computer Vision, Manipulation, Motion Planning, Gazebo, Shadow Hands, Emika Franka Robot Arm, Intel RealSense, ABB Gofa Arm
Maze Solver
Python, Motion Planning
Dancing Hexapod - Full SE3 Body Pose Control
Python, Motion Planning, Legged Locomotion, PyBullet, HEBI Daisy Hexapod
TeleOperation of Robot Swarms with ROS
Python, ROS2/ROS, Motion Planning, Controls, Wheeled Locomotion, Jetson Nano
Navigation and Kalman Filter Localization of Self Driving Car
Python, Motion Planning, Controls, Signal Processing, Wheeled Locomotion, Webots
Category Controls
Full Self Driving Airport Cargo Vehicle
C++, Python, ROS2/ROS, SLAM, Motion Planning, Machine Learning, Professional Software Development
Data-Driven Control for Agile Flight in a Confined Space
C++, Python, ROS2/ROS, Aerial Robots, Motion Planning, Computer Vision, Dynamic Systems
HEBI Robotics: Internship
C++, Python, ROS2/ROS, C, Java, MATLAB, Professional Software Development
Multi-Agent Reinforcement Learning for Exploration, with custom Physics Simulator from scratch
Deep Learning, ROS2/ROS, C++, PyTorch, SLAM, Simulation, Motion Planning, Turtlebot
Search-and-Rescue Robot Dog: Autonomous Exploration and Visual SLAM with Unitree Go1
C++, ROS2/ROS, Python, SLAM, Computer Vision, Exploration, Legged Locomotion, Unitree, Zed, Jetson
Complete Extended-Kalman-Filter SLAM Pipeline in C++ from Scratch
ROS2/ROS, C++, CMake, SLAM, Machine Learning, Python, Wheeled Locomotion, Turtlebot
Genetic Algorithm for Slithering and Sidewinding creatures
Python, MuJoCo, Machine Learning, Nonlinear Optimization, Controls
Mobile/Whole-Body Manipulation with KUKA youBot
MATLAB, Manipulation, Motion Planning, Controls, CoppeliaSim, KUKA youBot
Dexterous Manipulation through Virtual Reality
Python, ROS2/ROS, Computer Vision, Manipulation, Motion Planning, Gazebo, Shadow Hands, Emika Franka Robot Arm, Intel RealSense, ABB Gofa Arm
Optimized Torque-Control for Load Carrying
Research, Python, Legged Locomotion, Model-Predictive Control, Nonlinear Optimization, Dynamic Systems, HEBI Daisy Hexapod
Dancing Hexapod - Full SE3 Body Pose Control
Python, Motion Planning, Legged Locomotion, PyBullet, HEBI Daisy Hexapod
Ploughing through Clutter: Robust Non-Holonomic Motion Control
Python, Controls, Nonlinear Optimization, Manipulation, PyBullet, Wheeled Locomotion, Turtlebot
TeleOperation of Robot Swarms with ROS
Python, ROS2/ROS, Motion Planning, Controls, Wheeled Locomotion, Jetson Nano
Navigation and Kalman Filter Localization of Self Driving Car
Python, Motion Planning, Controls, Signal Processing, Wheeled Locomotion, Webots
Category Wheeled Locomotion
Full Self Driving Airport Cargo Vehicle
C++, Python, ROS2/ROS, SLAM, Motion Planning, Machine Learning, Professional Software Development
Multi-Agent Reinforcement Learning for Exploration, with custom Physics Simulator from scratch
Deep Learning, ROS2/ROS, C++, PyTorch, SLAM, Simulation, Motion Planning, Turtlebot
Complete Extended-Kalman-Filter SLAM Pipeline in C++ from Scratch
ROS2/ROS, C++, CMake, SLAM, Machine Learning, Python, Wheeled Locomotion, Turtlebot
Mobile/Whole-Body Manipulation with KUKA youBot
MATLAB, Manipulation, Motion Planning, Controls, CoppeliaSim, KUKA youBot
Ploughing through Clutter: Robust Non-Holonomic Motion Control
Python, Controls, Nonlinear Optimization, Manipulation, PyBullet, Wheeled Locomotion, Turtlebot
TeleOperation of Robot Swarms with ROS
Python, ROS2/ROS, Motion Planning, Controls, Wheeled Locomotion, Jetson Nano
Navigation and Kalman Filter Localization of Self Driving Car
Python, Motion Planning, Controls, Signal Processing, Wheeled Locomotion, Webots
Category Dynamic Systems
Full Self Driving Airport Cargo Vehicle
C++, Python, ROS2/ROS, SLAM, Motion Planning, Machine Learning, Professional Software Development
Data-Driven Control for Agile Flight in a Confined Space
C++, Python, ROS2/ROS, Aerial Robots, Motion Planning, Computer Vision, Dynamic Systems
HEBI Robotics: Internship
C++, Python, ROS2/ROS, C, Java, MATLAB, Professional Software Development
Search-and-Rescue Robot Dog: Autonomous Exploration and Visual SLAM with Unitree Go1
C++, ROS2/ROS, Python, SLAM, Computer Vision, Exploration, Legged Locomotion, Unitree, Zed, Jetson
Dexterous Manipulation through Virtual Reality
Python, ROS2/ROS, Computer Vision, Manipulation, Motion Planning, Gazebo, Shadow Hands, Emika Franka Robot Arm, Intel RealSense, ABB Gofa Arm
Optimized Torque-Control for Load Carrying
Research, Python, Legged Locomotion, Model-Predictive Control, Nonlinear Optimization, Dynamic Systems, HEBI Daisy Hexapod
Ploughing through Clutter: Robust Non-Holonomic Motion Control
Python, Controls, Nonlinear Optimization, Manipulation, PyBullet, Wheeled Locomotion, Turtlebot
Navigation and Kalman Filter Localization of Self Driving Car
Python, Motion Planning, Controls, Signal Processing, Wheeled Locomotion, Webots
Category Webots
Navigation and Kalman Filter Localization of Self Driving Car
Python, Motion Planning, Controls, Signal Processing, Wheeled Locomotion, Webots
Category Kalman Filter
Complete Extended-Kalman-Filter SLAM Pipeline in C++ from Scratch
ROS2/ROS, C++, CMake, SLAM, Machine Learning, Python, Wheeled Locomotion, Turtlebot
Navigation and Kalman Filter Localization of Self Driving Car
Python, Motion Planning, Controls, Signal Processing, Wheeled Locomotion, Webots
Category ROS2/ROS
Full Self Driving Airport Cargo Vehicle
C++, Python, ROS2/ROS, SLAM, Motion Planning, Machine Learning, Professional Software Development
Data-Driven Control for Agile Flight in a Confined Space
C++, Python, ROS2/ROS, Aerial Robots, Motion Planning, Computer Vision, Dynamic Systems
HEBI Robotics: Internship
C++, Python, ROS2/ROS, C, Java, MATLAB, Professional Software Development
Multi-Agent Reinforcement Learning for Exploration, with custom Physics Simulator from scratch
Deep Learning, ROS2/ROS, C++, PyTorch, SLAM, Simulation, Motion Planning, Turtlebot
Search-and-Rescue Robot Dog: Autonomous Exploration and Visual SLAM with Unitree Go1
C++, ROS2/ROS, Python, SLAM, Computer Vision, Exploration, Legged Locomotion, Unitree, Zed, Jetson
Complete Extended-Kalman-Filter SLAM Pipeline in C++ from Scratch
ROS2/ROS, C++, CMake, SLAM, Machine Learning, Python, Wheeled Locomotion, Turtlebot
Dexterous Manipulation through Virtual Reality
Python, ROS2/ROS, Computer Vision, Manipulation, Motion Planning, Gazebo, Shadow Hands, Emika Franka Robot Arm, Intel RealSense, ABB Gofa Arm
TeleOperation of Robot Swarms with ROS
Python, ROS2/ROS, Motion Planning, Controls, Wheeled Locomotion, Jetson Nano
Category Jetson Nano
TeleOperation of Robot Swarms with ROS
Python, ROS2/ROS, Motion Planning, Controls, Wheeled Locomotion, Jetson Nano
Category Nonlinear Optimization
Multi-Agent Reinforcement Learning for Exploration, with custom Physics Simulator from scratch
Deep Learning, ROS2/ROS, C++, PyTorch, SLAM, Simulation, Motion Planning, Turtlebot
Genetic Algorithm for Slithering and Sidewinding creatures
Python, MuJoCo, Machine Learning, Nonlinear Optimization, Controls
Optimized Torque-Control for Load Carrying
Research, Python, Legged Locomotion, Model-Predictive Control, Nonlinear Optimization, Dynamic Systems, HEBI Daisy Hexapod
Ploughing through Clutter: Robust Non-Holonomic Motion Control
Python, Controls, Nonlinear Optimization, Manipulation, PyBullet, Wheeled Locomotion, Turtlebot
Category PyBullet
Optimized Torque-Control for Load Carrying
Research, Python, Legged Locomotion, Model-Predictive Control, Nonlinear Optimization, Dynamic Systems, HEBI Daisy Hexapod
Dancing Hexapod - Full SE3 Body Pose Control
Python, Motion Planning, Legged Locomotion, PyBullet, HEBI Daisy Hexapod
Ploughing through Clutter: Robust Non-Holonomic Motion Control
Python, Controls, Nonlinear Optimization, Manipulation, PyBullet, Wheeled Locomotion, Turtlebot
Category Turtlebot
Multi-Agent Reinforcement Learning for Exploration, with custom Physics Simulator from scratch
Deep Learning, ROS2/ROS, C++, PyTorch, SLAM, Simulation, Motion Planning, Turtlebot
Complete Extended-Kalman-Filter SLAM Pipeline in C++ from Scratch
ROS2/ROS, C++, CMake, SLAM, Machine Learning, Python, Wheeled Locomotion, Turtlebot
Ploughing through Clutter: Robust Non-Holonomic Motion Control
Python, Controls, Nonlinear Optimization, Manipulation, PyBullet, Wheeled Locomotion, Turtlebot
Category Legged Locomotion
Search-and-Rescue Robot Dog: Autonomous Exploration and Visual SLAM with Unitree Go1
C++, ROS2/ROS, Python, SLAM, Computer Vision, Exploration, Legged Locomotion, Unitree, Zed, Jetson
Legged Robots for Object Manipulation: A Review
Research, Legged Locomotion, Manipulation
Optimized Torque-Control for Load Carrying
Research, Python, Legged Locomotion, Model-Predictive Control, Nonlinear Optimization, Dynamic Systems, HEBI Daisy Hexapod
Dancing Hexapod - Full SE3 Body Pose Control
Python, Motion Planning, Legged Locomotion, PyBullet, HEBI Daisy Hexapod
Category HEBI Daisy Hexapod
Optimized Torque-Control for Load Carrying
Research, Python, Legged Locomotion, Model-Predictive Control, Nonlinear Optimization, Dynamic Systems, HEBI Daisy Hexapod
Dancing Hexapod - Full SE3 Body Pose Control
Python, Motion Planning, Legged Locomotion, PyBullet, HEBI Daisy Hexapod
Category Research
Legged Robots for Object Manipulation: A Review
Research, Legged Locomotion, Manipulation
Optimized Torque-Control for Load Carrying
Research, Python, Legged Locomotion, Model-Predictive Control, Nonlinear Optimization, Dynamic Systems, HEBI Daisy Hexapod
Category Model-Predictive Control
Optimized Torque-Control for Load Carrying
Research, Python, Legged Locomotion, Model-Predictive Control, Nonlinear Optimization, Dynamic Systems, HEBI Daisy Hexapod
Category Computer Vision
Data-Driven Control for Agile Flight in a Confined Space
C++, Python, ROS2/ROS, Aerial Robots, Motion Planning, Computer Vision, Dynamic Systems
Search-and-Rescue Robot Dog: Autonomous Exploration and Visual SLAM with Unitree Go1
C++, ROS2/ROS, Python, SLAM, Computer Vision, Exploration, Legged Locomotion, Unitree, Zed, Jetson
Dexterous Manipulation through Virtual Reality
Python, ROS2/ROS, Computer Vision, Manipulation, Motion Planning, Gazebo, Shadow Hands, Emika Franka Robot Arm, Intel RealSense, ABB Gofa Arm
Category Gazebo
Dexterous Manipulation through Virtual Reality
Python, ROS2/ROS, Computer Vision, Manipulation, Motion Planning, Gazebo, Shadow Hands, Emika Franka Robot Arm, Intel RealSense, ABB Gofa Arm
Category Shadow Hands
Dexterous Manipulation through Virtual Reality
Python, ROS2/ROS, Computer Vision, Manipulation, Motion Planning, Gazebo, Shadow Hands, Emika Franka Robot Arm, Intel RealSense, ABB Gofa Arm
Category Emika Franka Robot Arm
Dexterous Manipulation through Virtual Reality
Python, ROS2/ROS, Computer Vision, Manipulation, Motion Planning, Gazebo, Shadow Hands, Emika Franka Robot Arm, Intel RealSense, ABB Gofa Arm
Category Intel RealSense
Dexterous Manipulation through Virtual Reality
Python, ROS2/ROS, Computer Vision, Manipulation, Motion Planning, Gazebo, Shadow Hands, Emika Franka Robot Arm, Intel RealSense, ABB Gofa Arm
Category ABB Gofa Arm
Dexterous Manipulation through Virtual Reality
Python, ROS2/ROS, Computer Vision, Manipulation, Motion Planning, Gazebo, Shadow Hands, Emika Franka Robot Arm, Intel RealSense, ABB Gofa Arm
Category MATLAB
HEBI Robotics: Internship
C++, Python, ROS2/ROS, C, Java, MATLAB, Professional Software Development
Mobile/Whole-Body Manipulation with KUKA youBot
MATLAB, Manipulation, Motion Planning, Controls, CoppeliaSim, KUKA youBot
Category CoppeliaSim
Mobile/Whole-Body Manipulation with KUKA youBot
MATLAB, Manipulation, Motion Planning, Controls, CoppeliaSim, KUKA youBot
Category KUKA youBot
Mobile/Whole-Body Manipulation with KUKA youBot
MATLAB, Manipulation, Motion Planning, Controls, CoppeliaSim, KUKA youBot
Category MuJoCo
Genetic Algorithm for Slithering and Sidewinding creatures
Python, MuJoCo, Machine Learning, Nonlinear Optimization, Controls
Category Machine Learning
Full Self Driving Airport Cargo Vehicle
C++, Python, ROS2/ROS, SLAM, Motion Planning, Machine Learning, Professional Software Development
Multi-Agent Reinforcement Learning for Exploration, with custom Physics Simulator from scratch
Deep Learning, ROS2/ROS, C++, PyTorch, SLAM, Simulation, Motion Planning, Turtlebot
Complete Extended-Kalman-Filter SLAM Pipeline in C++ from Scratch
ROS2/ROS, C++, CMake, SLAM, Machine Learning, Python, Wheeled Locomotion, Turtlebot
Genetic Algorithm for Slithering and Sidewinding creatures
Python, MuJoCo, Machine Learning, Nonlinear Optimization, Controls
Category CMake
Full Self Driving Airport Cargo Vehicle
C++, Python, ROS2/ROS, SLAM, Motion Planning, Machine Learning, Professional Software Development
Data-Driven Control for Agile Flight in a Confined Space
C++, Python, ROS2/ROS, Aerial Robots, Motion Planning, Computer Vision, Dynamic Systems
HEBI Robotics: Internship
C++, Python, ROS2/ROS, C, Java, MATLAB, Professional Software Development
Multi-Agent Reinforcement Learning for Exploration, with custom Physics Simulator from scratch
Deep Learning, ROS2/ROS, C++, PyTorch, SLAM, Simulation, Motion Planning, Turtlebot
Search-and-Rescue Robot Dog: Autonomous Exploration and Visual SLAM with Unitree Go1
C++, ROS2/ROS, Python, SLAM, Computer Vision, Exploration, Legged Locomotion, Unitree, Zed, Jetson
Complete Extended-Kalman-Filter SLAM Pipeline in C++ from Scratch
ROS2/ROS, C++, CMake, SLAM, Machine Learning, Python, Wheeled Locomotion, Turtlebot
Category SLAM
Multi-Agent Reinforcement Learning for Exploration, with custom Physics Simulator from scratch
Deep Learning, ROS2/ROS, C++, PyTorch, SLAM, Simulation, Motion Planning, Turtlebot
Search-and-Rescue Robot Dog: Autonomous Exploration and Visual SLAM with Unitree Go1
C++, ROS2/ROS, Python, SLAM, Computer Vision, Exploration, Legged Locomotion, Unitree, Zed, Jetson
Complete Extended-Kalman-Filter SLAM Pipeline in C++ from Scratch
ROS2/ROS, C++, CMake, SLAM, Machine Learning, Python, Wheeled Locomotion, Turtlebot
Category LIDAR
Multi-Agent Reinforcement Learning for Exploration, with custom Physics Simulator from scratch
Deep Learning, ROS2/ROS, C++, PyTorch, SLAM, Simulation, Motion Planning, Turtlebot
Complete Extended-Kalman-Filter SLAM Pipeline in C++ from Scratch
ROS2/ROS, C++, CMake, SLAM, Machine Learning, Python, Wheeled Locomotion, Turtlebot
Category Unitree
Search-and-Rescue Robot Dog: Autonomous Exploration and Visual SLAM with Unitree Go1
C++, ROS2/ROS, Python, SLAM, Computer Vision, Exploration, Legged Locomotion, Unitree, Zed, Jetson
Category Zed
Search-and-Rescue Robot Dog: Autonomous Exploration and Visual SLAM with Unitree Go1
C++, ROS2/ROS, Python, SLAM, Computer Vision, Exploration, Legged Locomotion, Unitree, Zed, Jetson
Category Jetson
Search-and-Rescue Robot Dog: Autonomous Exploration and Visual SLAM with Unitree Go1
C++, ROS2/ROS, Python, SLAM, Computer Vision, Exploration, Legged Locomotion, Unitree, Zed, Jetson
Category Exploration
Multi-Agent Reinforcement Learning for Exploration, with custom Physics Simulator from scratch
Deep Learning, ROS2/ROS, C++, PyTorch, SLAM, Simulation, Motion Planning, Turtlebot
Search-and-Rescue Robot Dog: Autonomous Exploration and Visual SLAM with Unitree Go1
C++, ROS2/ROS, Python, SLAM, Computer Vision, Exploration, Legged Locomotion, Unitree, Zed, Jetson
Category Deep Learning
Multi-Agent Reinforcement Learning for Exploration, with custom Physics Simulator from scratch
Deep Learning, ROS2/ROS, C++, PyTorch, SLAM, Simulation, Motion Planning, Turtlebot
Category PyTorch
Multi-Agent Reinforcement Learning for Exploration, with custom Physics Simulator from scratch
Deep Learning, ROS2/ROS, C++, PyTorch, SLAM, Simulation, Motion Planning, Turtlebot
Category Reinforcement Learning
Multi-Agent Reinforcement Learning for Exploration, with custom Physics Simulator from scratch
Deep Learning, ROS2/ROS, C++, PyTorch, SLAM, Simulation, Motion Planning, Turtlebot
Category C
Full Self Driving Airport Cargo Vehicle
C++, Python, ROS2/ROS, SLAM, Motion Planning, Machine Learning, Professional Software Development
HEBI Robotics: Internship
C++, Python, ROS2/ROS, C, Java, MATLAB, Professional Software Development
Category Java
HEBI Robotics: Internship
C++, Python, ROS2/ROS, C, Java, MATLAB, Professional Software Development
Category API
Full Self Driving Airport Cargo Vehicle
C++, Python, ROS2/ROS, SLAM, Motion Planning, Machine Learning, Professional Software Development
HEBI Robotics: Internship
C++, Python, ROS2/ROS, C, Java, MATLAB, Professional Software Development
Category Aerial Robots