All Projects
Mobile/Whole-Body Manipulation with KUKA youBot
MATLAB, Manipulation, Motion Planning, Controls, CoppeliaSim, KUKA youBot
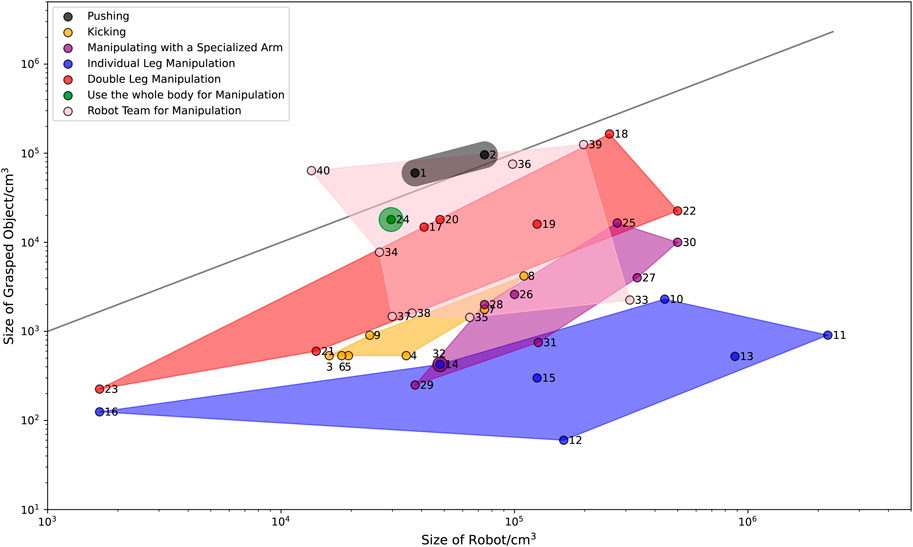
Legged Robots for Object Manipulation: A Review
Research, Legged Locomotion, Manipulation
Ploughing through Clutter: Robust Non-Holonomic Motion Control
Python, Controls, Nonlinear Optimization, Manipulation, PyBullet, Wheeled Locomotion, Turtlebot

TeleOperation of Robot Swarms with ROS
Python, ROS2/ROS, Motion Planning, Controls, Wheeled Locomotion, Jetson Nano
Navigation and Kalman Filter Localization of Self Driving Car
Python, Motion Planning, Controls, Signal Processing, Wheeled Locomotion, Webots